
CNC Parts, Kits & Electronics for DIY Builders
Controllers, motors, microcontrollers, Mach3/Mach4 software, and DIY components with setup support included.
Find the Right CNC Parts, Electronics & Machine Kits
Build, repair, upgrade, and understand CNC machines with organized shopping paths for control electronics, machine kits, CNC parts, and beginner-friendly electronics learning tools.

CNC Electronics
Browse CNC electronics categories including controllers, breakout boards, stepper motors, drivers, power supplies, relays, switches, cables, connectors, and plasma control parts.
- Controllers, boards, motors, and drivers
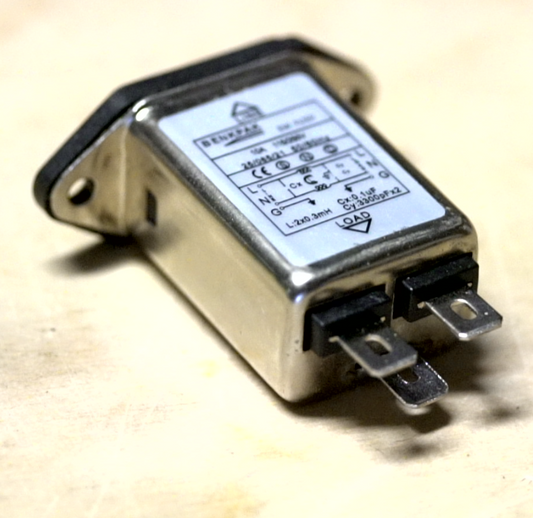
- Power supplies, switches, relays, and wiring
- Organized by category for faster shopping

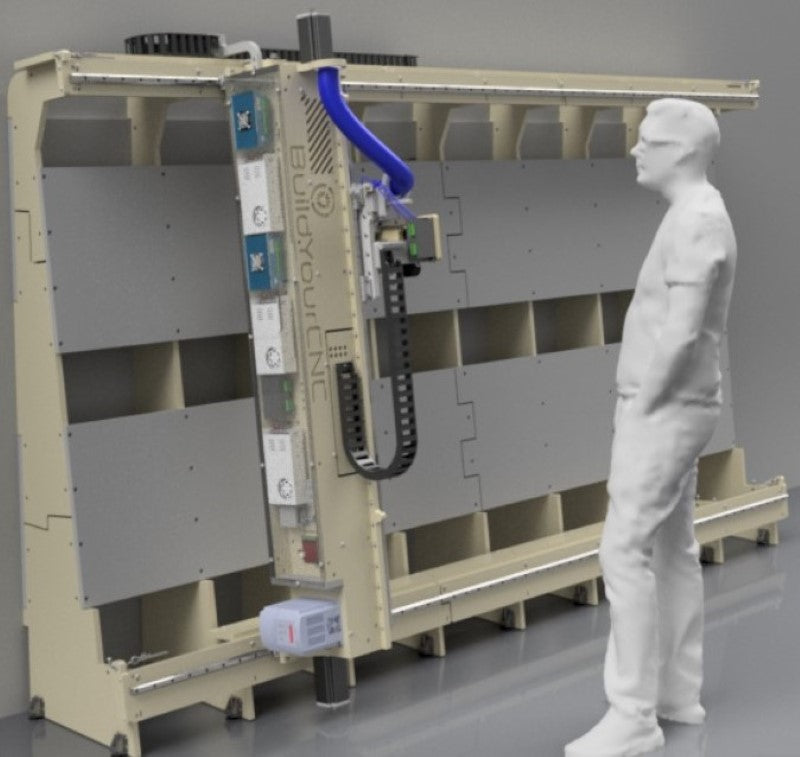
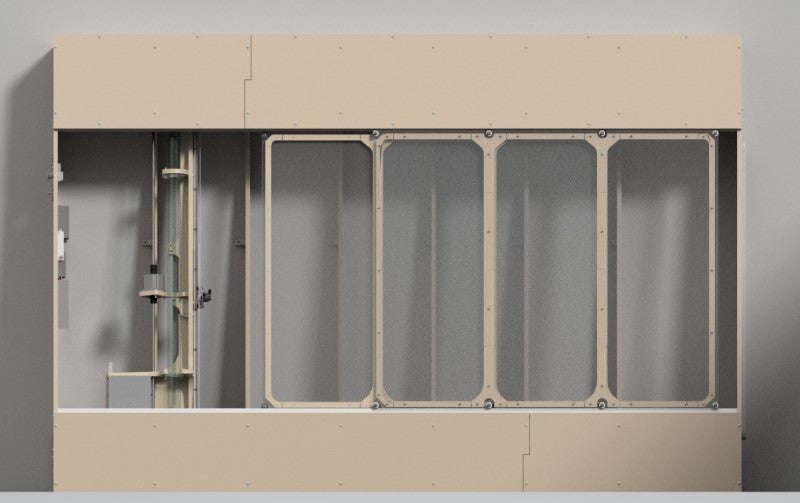
CNC Machines & Kits
Start here for CNC machines, router kits, machine plans, and larger build options for customers who want a more complete starting point.
- CNC router machine options
- Machine kits and plans
- Build paths for DIY CNC users

Newbiehack Learning Kits
Learn electronics, programming, sensors, and microcontroller projects with beginner-friendly kits separate from CNC machine parts.
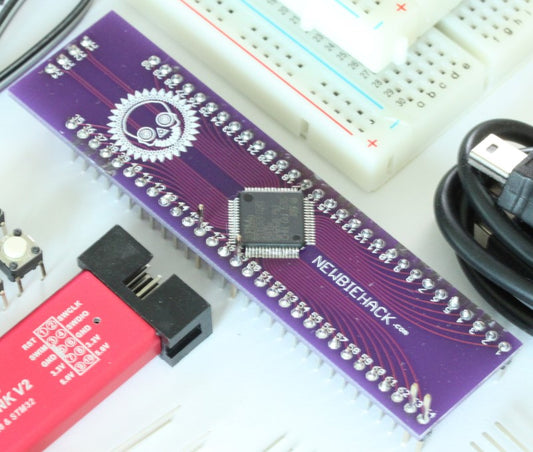
- ARM microcontroller learning kits
- Electronics and programming basics
- Beginner-friendly project components

1.5KW 110V VFD Clearance – 50% Off
We’re clearing out remaining inventory at half price. Limited quantity available and this deal ends when they sell out.
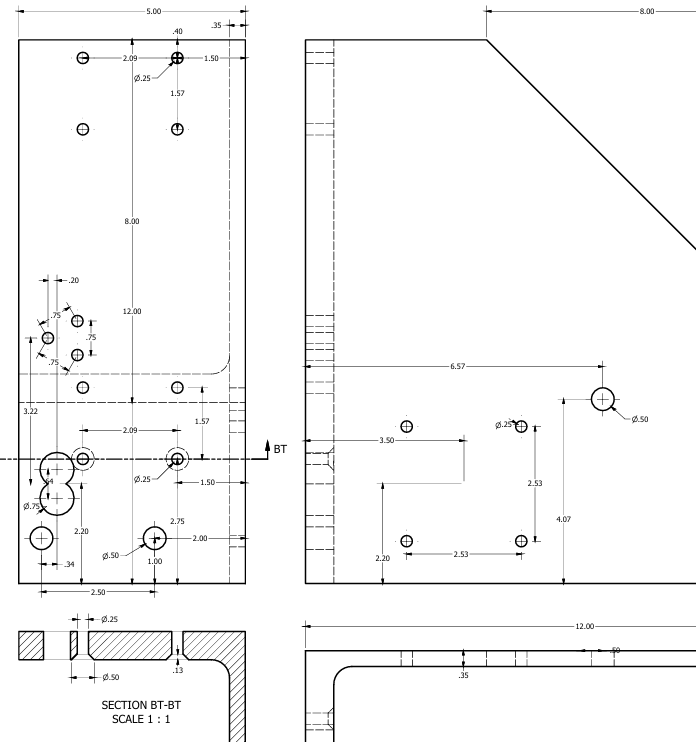
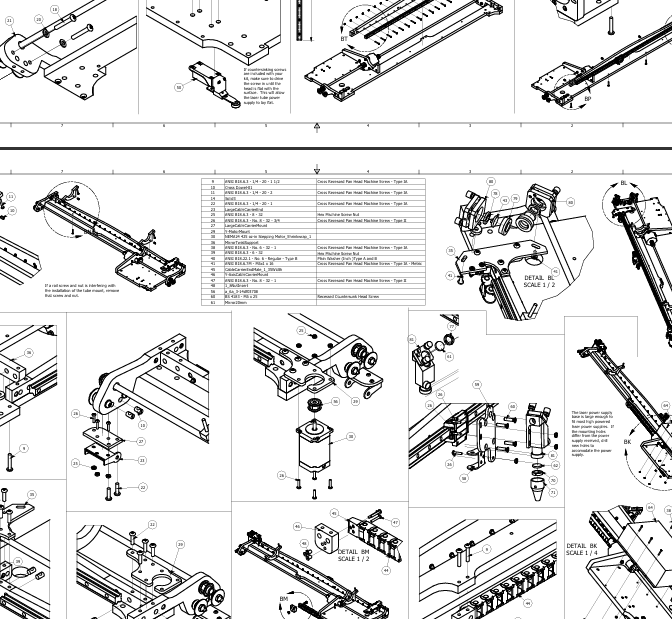
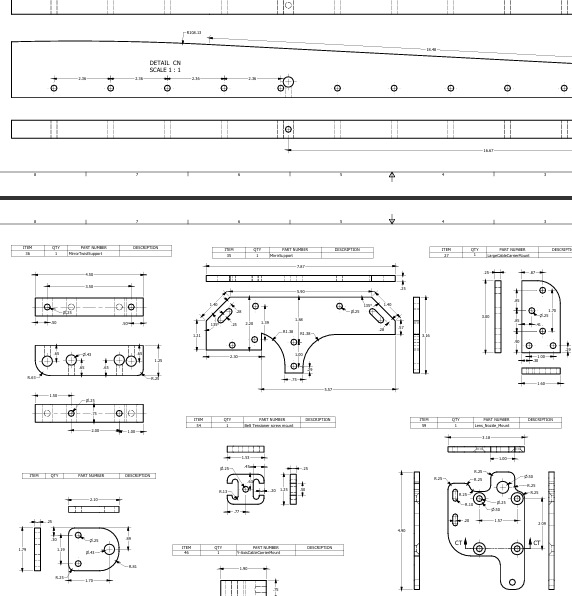
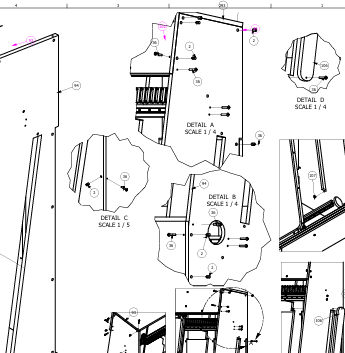
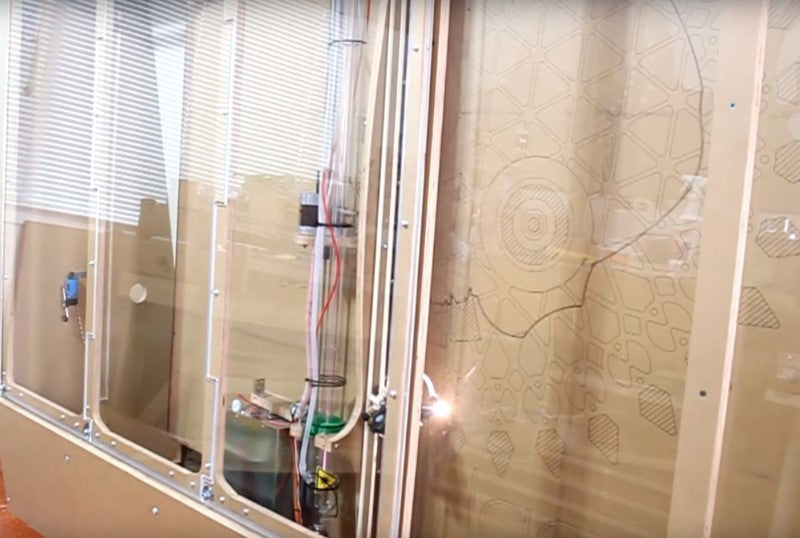
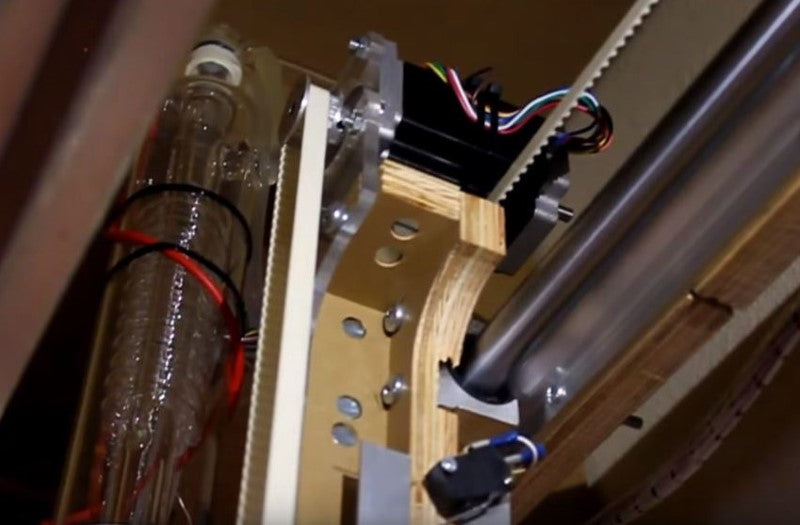
CNC Router and Laser Plans


























Featured products
-
ARM Microcontroller Advanced Kit with Book
Regular price $158.00 USDRegular priceUnit price per -
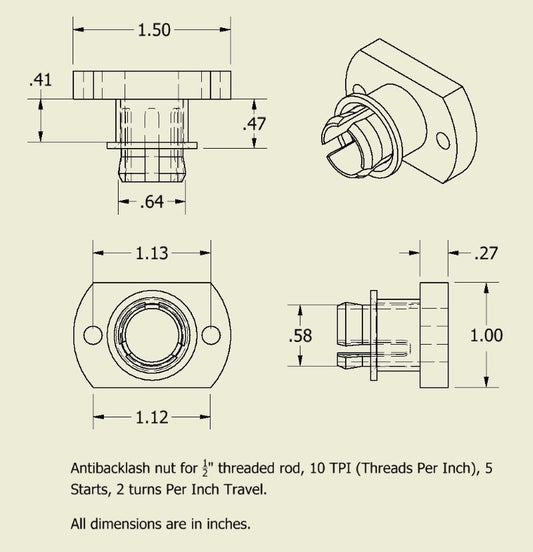
1/2" Anti-Backlash Nut
Regular price From $37.39 USDRegular priceUnit price per$74.78 USDSale price From $37.39 USDSale -
Mach3 CNC Control Software
Regular price $175.00 USDRegular priceUnit price per$175.00 USDSale price $175.00 USD -
Mach4 CNC Control Software
Regular price $200.00 USDRegular priceUnit price per$200.00 USDSale price $200.00 USD -
E-Stop (Emergency Stop) Button With LED Indicator
Regular price $6.00 USDRegular priceUnit price per$11.95 USDSale price $6.00 USDSale -
M12 4-Pin Male to Female Sensor Cable A Code 2 Meters (For Proximity, Limit and E-Stop Switches and Other Sensors)
Regular price $17.00 USDRegular priceUnit price per -
M12 4-Pin Male Sensor Connector A Code (For Proximity, Limit and E-Stop Switches and Other Sensors)
Regular price $9.00 USDRegular priceUnit price per -
M12 4-Pin Female Sensor Connector (For Proximity, Limit, E-Stop Switches)
Regular price $9.00 USDRegular priceUnit price per -
ARM Microcontrollers: Programming and Circuit Building Volume 1 Book
Regular price $39.00 USDRegular priceUnit price per -
ARM Microcontroller Advanced Kit (STM32F0)
Regular price $119.95 USDRegular priceUnit price per -
NEMA 23 Stepper Motor (425 oz-in 1/4" dual shaft) 2.8 Amps
Regular price $45.00 USDRegular priceUnit price per -
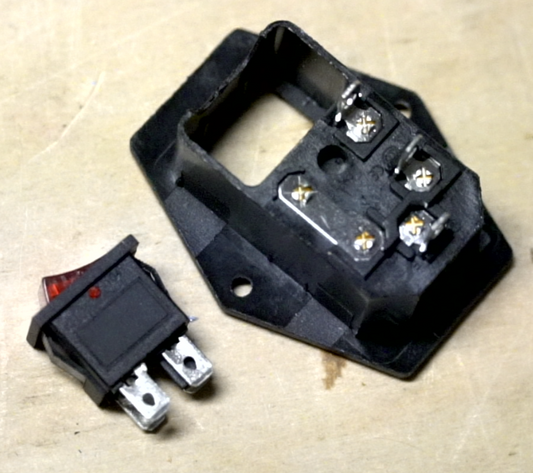
AC Power Connector C14 Male 3 Pins Screw Panel Mount 10A 250V IEC 320 With Fuse and Switch
Regular price $6.95 USDRegular priceUnit price per -
AC Power Connector C14 Male 3 Pins Screw Panel Mount 10A 250V IEC 320
Regular price $12.95 USDRegular priceUnit price per -
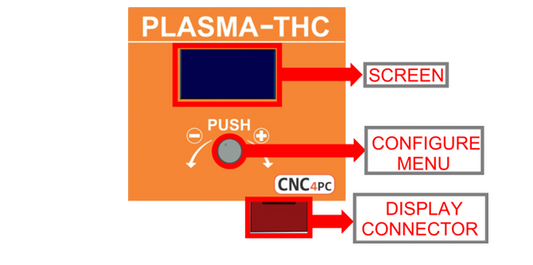
THC-2 Plasma Torch Height Control
Regular price $270.00 USDRegular priceUnit price per -
greenBull v2 Small (2'x4') CNC Router Digital Plans
Regular price From $5.00 USDRegular priceUnit price per -
CNC Spindle Speed Control Bundle
Regular price $56.95 USDRegular priceUnit price per$59.09 USDSale price $56.95 USDSale






















Free support on every order. Always.
Bought from us? Setup, wiring, compatibility, and build help on what you ordered is free — no time limits, no tokens. Reply to any order email and a real person at our shop will help you out.